BHook原理解析 基础概念 PLT/GOT hook
BHook是一个plt/got hook框架。
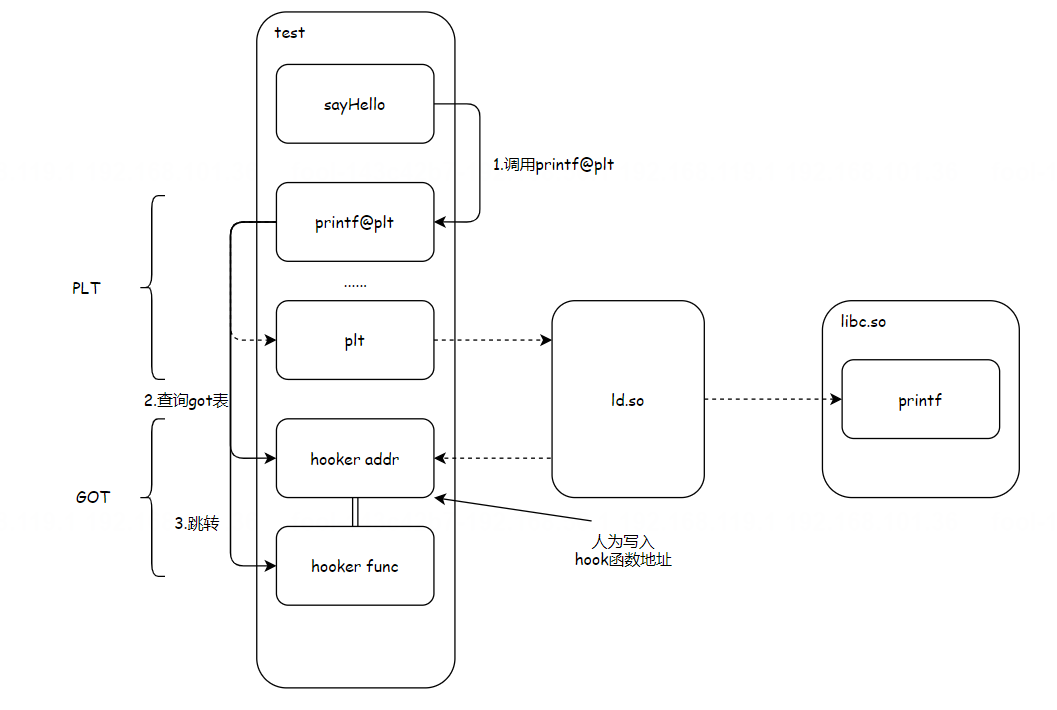
plt/got hook是指,利用动态链接过程的特点。
即——使用PLT表作为跳板查got表来查询被调用函数的地址在哪
如果我们修改GOT表内的地址就可以实现劫持函数的执行过程。
示例
test.c
1 2 3 4 5 6 7 #include <stdio.h> void sayHell () { printf ("Hello World" ); } int main () { sayHello(); }
PLT/GOT hook前
hook 后
Relocation
即重定位,讲符号引用转化为直接引用。
说直白点就是:
编译器在编译一个库函数调用的时候,编译器本身是不知道你调用的地址在哪,所以会直接用0填充
于此同时他会在.rela中生成一条记录(我们暂且称之为“坑位“),告知来着,哪个函数调用需要填充地址。
Relocation即填坑的过程。
静态链接
对于静态链接,Relocation会在编译的时候完成。
hello.c
1 2 3 4 5 #include <stdio.h> void printHello () { printf ("Hello World!\n" ); }
static.c
1 2 3 4 5 6 7 #include <stdio.h> extern void printHello () ;int main () { printHello(); }
编译静态库,编译调用文件
1 2 gcc -o hello.o -c hello.c # 编译Hello 文件 ar rc hello.a hello.o # 创建静态hello.a文件
验证一:函数调用是否是填充的0
e8 00 00 00 00
e8表示callq,00 00 00 00 表示相对于当前指令的偏移量。
1 2 3 4 5 6 7 8 9 10 ➜ relocation objdump --disassemble=main static.o ...... 0000000000000000 <main>: 0: 55 push %rbp 1: 48 89 e5 mov %rsp,%rbp 4: b8 00 00 00 00 mov $0x0,%eax 9: e8 00 00 00 00 callq e <main+0xe> e: b8 00 00 00 00 mov $0x0,%eax 13: 5d pop %rbp 14: c3 retq
验证二:rela中是否有一条记录
这条记录表明
0x00000000000a地址处有一个“坑位”需要填充。
0xa不就是callq处的00 00 00 00
1 2 3 4 5 6 ➜ relocation readelf -r static.o Relocation section '.rela.text' at offset 0x1f0 contains 1 entry: Offset Info Type Sym. Value Sym. Name + Addend 00000000000a 000a00000004 R_X86_64_PLT32 0000000000000000 printHello - 4
验证三:静态链接是否是在编译时就进行了relocation
首先我们先创建elf文件
1 gcc -o static static .o hello.a -static
反编译查看。
很明显空位已经被填充了
1 2 3 4 5 6 7 8 9 10 11 12 13 ➜ relocation objdump --disassemble=main static static : file format elf64-x86-64 ...... 0000000000401 c8d <main>: 401 c8d: 55 push %rbp 401 c8e: 48 89 e5 mov %rsp,%rbp 401 c91: b8 00 00 00 00 mov $0x0 ,%eax 401 c96: e8 07 00 00 00 callq 401 ca2 <printHello> 401 c9b: b8 00 00 00 00 mov $0x0 ,%eax 401 ca0: 5 d pop %rbp 401 ca1: c3 retq
动态链接
使用的代码同上
编译文件
1 2 ➜ relocation gcc -o dynamic.o -c dynamic.c ➜ relocation gcc -o hello.o -c hello.c
创建静态库
1 gcc -o libhello.so hello.o -shared -fPIC
链接
1 gcc -o dynamic dynamic.o -L. -lhello -Wl,-rpath=.
验证一:是否预留的“坑位”
动态链接的“坑位”不是直接填充0,而是got表
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 # 查看main函数 ➜ relocation objdump --disassemble=main dynamic dynamic: file format elf64-x86-64 ...... 0000000000001135 <main>: 1135: 55 push %rbp 1136: 48 89 e5 mov %rsp,%rbp 1139: b8 00 00 00 00 mov $0x0,%eax 113e: e8 ed fe ff ff callq 1030 <printHello@plt> 1143: b8 00 00 00 00 mov $0x0,%eax 1148: 5d pop %rbp 1149: c3 retq # 查看plt ➜ relocation objdump --disassemble=printHello@plt dynamic dynamic: file format elf64-x86-64 ...... 0000000000001030 <printHello@plt>: # 直接jmp got表所在地址 # 这个地址编译器生成默认的值是下一行代码的地址,即1036 1030: ff 25 e2 2f 00 00 jmpq *0x2fe2(%rip) # 4018 <printHello> 1036: 68 00 00 00 00 pushq $0x0 103b: e9 e0 ff ff ff jmpq 1020 <.plt> 1040: Address 0x0000000000001040 is out of bounds. # 查看got表 ➜ relocation readelf -x .got.plt dynamic Hex dump of section '.got.plt': NOTE: This section has relocations against it, but these have NOT been applied to this dump. # got.plt的起始地址为4000,4018为0x1036(别忘了小端序) 0x00004000 d83d0000 00000000 00000000 00000000 .=.............. 0x00004010 00000000 00000000 36100000 00000000 ........6.......
验证二:是否生成了rela数据
当然生成了只是不同于静态链接的.rela.text。
.rela.plt通常用于懒加载。
即调用plt跳板后让ld在这个地方填充放入函数地址
1 2 3 4 5 ➜ relocation readelf -r dynamic Relocation section '.rela.plt' at offset 0x560 contains 1 entry: Offset Info Type Sym. Value Sym. Name + Addend 000000004018 000200000007 R_X86_64_JUMP_SLO 0000000000000000 printHello + 0
初始化 java
Java部分主要提供一层API,其实啥也没做。
一层层最后调用到JNI。
Application
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 public class XXXApplication extends Application { @Override protected void attachBaseContext (Context base) { super .attachBaseContext(base); int r = ByteHook.init(new ByteHook .ConfigBuilder() .build()); } }
初始化
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 public static synchronized int init (Config config) { if (inited) { return initStatus; } inited = true ; try { initStatus = nativeInit(config.getMode(), config.getDebug()); } catch (Throwable ignored) { initStatus = ERRNO_INIT_EXCEPTION; } initCostMs = System.currentTimeMillis() - start; return initStatus; }
Note:
JNI注册表
1 2 3 4 5 6 7 8 9 10 11 JNINativeMethod m[] = {{"nativeGetVersion" , "()Ljava/lang/String;" , (void *)bh_jni_get_version}, {"nativeInit" , "(IZ)I" , (void *)bh_jni_init}, {"nativeAddIgnore" , "(Ljava/lang/String;)I" , (void *)bh_jni_add_ignore}, {"nativeGetMode" , "()I" , (void *)bh_jni_get_mode}, {"nativeGetDebug" , "()Z" , (void *)bh_jni_get_debug}, {"nativeSetDebug" , "(Z)V" , (void *)bh_jni_set_debug}, {"nativeGetRecordable" , "()Z" , (void *)bh_jni_get_recordable}, {"nativeSetRecordable" , "(Z)V" , (void *)bh_jni_set_recordable}, {"nativeGetRecords" , "(I)Ljava/lang/String;" , (void *)bh_jni_get_records}, {"nativeGetArch" , "()Ljava/lang/String;" , (void *)bh_jni_get_arch}};
初始化
1 2 3 4 5 6 7 8 9 10 static jint bh_jni_init (JNIEnv *env, jobject thiz, jint mode, jboolean debug) { (void )env; (void )thiz; return bytehook_init((int )mode, (bool )debug); } int bytehook_init (int mode, bool debug) { return bh_core_init(mode, debug); }
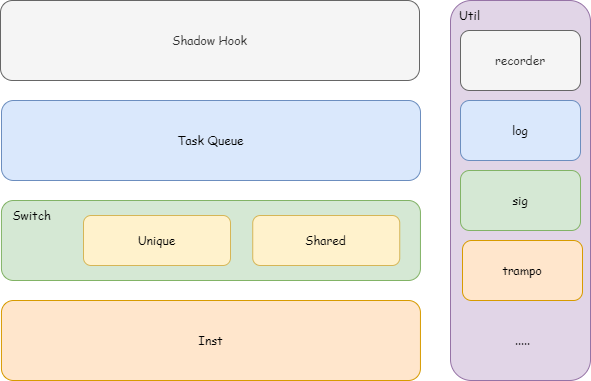
bh_core_init
linkerinit
manager init
task manager
hook manager
elf manager
trampo init
signal init(SIGSEGV/SIGBUS)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 int bh_core_init (int mode, bool debug) { if (BYTEHOOK_STATUS_CODE_UNINIT != bh_core.init_status) { BH_LOG_SHOW("bytehook already inited, return: %d" , bh_core.init_status); return bh_core.init_status; } static pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER; pthread_mutex_lock(&lock); if (__predict_true(BYTEHOOK_STATUS_CODE_UNINIT == bh_core.init_status)) { int status; bh_log_set_debug(debug); if (BYTEHOOK_MODE_AUTOMATIC != mode && BYTEHOOK_MODE_MANUAL != mode) { status = BYTEHOOK_STATUS_CODE_INITERR_INVALID_ARG; goto end; } bh_core.mode = mode; if (0 != bh_linker_init()) { status = BYTEHOOK_STATUS_CODE_INITERR_SYM; goto end; } if (NULL == (bh_core.task_mgr = bh_task_manager_create())) { status = BYTEHOOK_STATUS_CODE_INITERR_TASK; goto end; } if (NULL == (bh_core.hook_mgr = bh_hook_manager_create())) { status = BYTEHOOK_STATUS_CODE_INITERR_HOOK; goto end; } if (NULL == (bh_core.elf_mgr = bh_elf_manager_create())) { status = BYTEHOOK_STATUS_CODE_INITERR_ELF; goto end; } if (BYTEHOOK_MODE_AUTOMATIC == mode && 0 != bh_trampo_init()) { status = BYTEHOOK_STATUS_CODE_INITERR_TRAMPO; goto end; } if (0 != bytesig_init(SIGSEGV) || 0 != bytesig_init(SIGBUS)) { status = BYTEHOOK_STATUS_CODE_INITERR_SIG; goto end; } if (0 != bh_cfi_disable_slowpath()) { status = BYTEHOOK_STATUS_CODE_INITERR_CFI; goto end; } status = BYTEHOOK_STATUS_CODE_OK; end: __atomic_store_n(&bh_core.init_status, status, __ATOMIC_SEQ_CST); } pthread_mutex_unlock(&lock); BH_LOG_SHOW("%s: bytehook init(mode: %s, debug: %s), return: %d" , bytehook_get_version(), BYTEHOOK_MODE_AUTOMATIC == mode ? "AUTOMATIC" : "MANUAL" , debug ? "true" : "false" , bh_core.init_status); return bh_core.init_status; }
bh_linker_init
读取锁变量的值
读取一些函数、全局变量地址,方便后续做兼容性适配
初始化如下变量
bh_linker_do_dlopen = NULL;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 int bh_linker_init (void ) { bh_linker_g_dl_mutex_compatible = bh_linker_check_lock_compatible(); int api_level = bh_util_get_api_level(); if (!bh_linker_g_dl_mutex_compatible) { if (0 != pthread_key_create(&bh_linker_g_dl_mutex_key, NULL )) return -1 ; } void *linker = bh_dl_open_linker(); if (NULL == linker) goto err; if (__ANDROID_API_L__ == api_level || __ANDROID_API_L_MR1__ == api_level || __ANDROID_API_N__ == api_level || __ANDROID_API_N_MR1__ == api_level || bh_linker_g_dl_mutex_compatible) { bh_linker_g_dl_mutex = (pthread_mutex_t *)(bh_dl_dsym(linker, BH_CONST_SYM_G_DL_MUTEX)); if (NULL == bh_linker_g_dl_mutex && api_level >= __ANDROID_API_U__) bh_linker_g_dl_mutex = (pthread_mutex_t *)(bh_dl_dsym(linker, BH_CONST_SYM_G_DL_MUTEX_U_QPR2)); if (NULL == bh_linker_g_dl_mutex) goto err; } if (__ANDROID_API_N__ == api_level || __ANDROID_API_N_MR1__ == api_level) { bh_linker_dlopen_ext = (bh_linker_dlopen_ext_t )(bh_dl_dsym(linker, BH_CONST_SYM_DLOPEN_EXT)); if (NULL == bh_linker_dlopen_ext) { if (NULL == (bh_linker_do_dlopen = (bh_linker_do_dlopen_t )(bh_dl_dsym(linker, BH_CONST_SYM_DO_DLOPEN)))) goto err; bh_linker_get_error_buffer = (bh_linker_get_error_buffer_t )(bh_dl_dsym(linker, BH_CONST_SYM_LINKER_GET_ERROR_BUFFER)); bh_linker_bionic_format_dlerror = (bh_linker_bionic_format_dlerror_t )(bh_dl_dsym(linker, BH_CONST_SYM_BIONIC_FORMAT_DLERROR)); } } bh_dl_close(linker); return 0 ; err: return -1 ; }
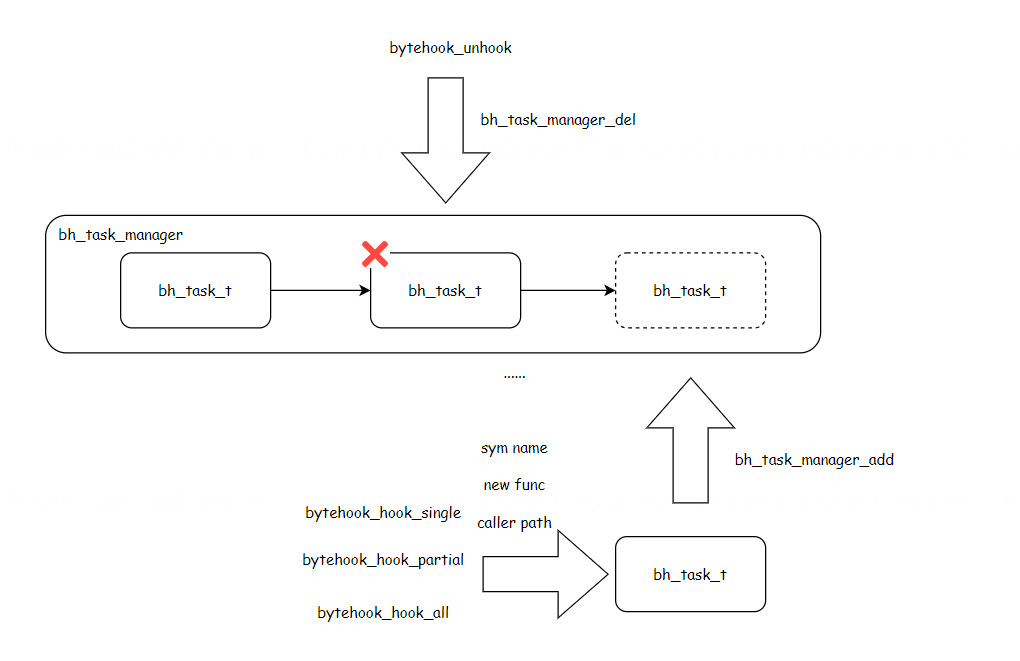
bh_task_manager_create
用于初始化task_manager结构体。
bh_task_manager_t主要用于存储bh_task_t
即用于存储hook single、hook partial、hook all的函数参数。
双向链表结构
单箭头不意味着,是单链表。偷懒没画双向剪头。😄
初始化数据结构
1 2 3 4 5 6 7 8 9 10 bh_task_manager_t *bh_task_manager_create (void ) { bh_task_manager_t *self = malloc (sizeof (bh_task_manager_t )); if (NULL == self) return NULL ; TAILQ_INIT(&self->tasks); pthread_rwlock_init(&self->lock, NULL ); return self; }
manager 结构体
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 typedef struct bh_task_manager bh_task_manager_t ;struct bh_task_manager { bh_task_queue_t tasks; pthread_rwlock_t lock; }; typedef TAILQ_HEAD (bh_task_queue, bh_task, ) bh_task_queue_t ;#define TAILQ_HEAD(name, type, qual) \ struct name { \ struct type *qual tqh_first; \ struct type *qual *tqh_last; \ } typedef struct bh_task { uint32_t id; bh_task_type_t type; bh_task_status_t status; char *caller_path_name; bytehook_caller_allow_filter_t caller_allow_filter; void *caller_allow_filter_arg; char *callee_path_name; void *callee_addr; char *sym_name; void *new_func; bytehook_hooked_t hooked; void *hooked_arg; int hook_status_code; void *manual_orig_func; TAILQ_ENTRY(bh_task, ) link; } bh_task_t ; #define TAILQ_ENTRY(type, qual) \ struct { \ struct type *qual tqe_next; \ struct type *qual *tqe_prev; \ }
bh_hook_manager_create
bh_hook_manager_t结构体是用于做automic模式
即对trampo hook链进行控制。
记录同一个函数下的所有hook。
数据结构是红黑树 + 链表,红黑树的每个元素就是一个链表。
初始化bh_hook_manager_t数据结构
1 2 3 4 5 6 7 8 9 10 11 bh_hook_manager_t *bh_hook_manager_create (void ) { bh_hook_manager_t *self; if (NULL == (self = malloc (sizeof (bh_hook_manager_t )))) return NULL ; RB_INIT(&self->hooks); RB_INIT(&self->abandoned_hooks); pthread_mutex_init(&self->hooks_lock, NULL ); return self; }
hook manager结构体
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 typedef struct bh_hook_manager bh_hook_manager_t ;struct bh_hook_manager { bh_hook_tree_t hooks; bh_hook_tree_t abandoned_hooks; pthread_mutex_t hooks_lock; }; typedef RB_HEAD (bh_hook_tree, bh_hook) bh_hook_tree_t ;#define RB_HEAD(name, type) \ struct name { \ struct type *rbh_root; \ } typedef struct bh_hook { void *got_addr; void *orig_func; bh_hook_call_list_t running_list; pthread_mutex_t running_list_lock; RB_ENTRY(bh_hook) link; } bh_hook_t ; #define RB_INIT(root) do { \ (root)->rbh_root = NULL; \ } while ( 0)
bh_elf_manager_create
用于记录open的elf文件。每open一个so文件,就会触发刷新bh_elf_manager_t内的数据。
bh_elf_manager_t是一个红黑树的数据结构,每一个element都是一个复合的结构体bh_elf(存储elf文件数据)
初始化bh_elf_manager_t数据结构
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 bh_elf_manager_t *bh_elf_manager_create (void ) { bh_elf_manager_t *self; if (NULL == (self = malloc (sizeof (bh_elf_manager_t )))) return NULL ; self->contain_pathname = false ; self->contain_basename = false ; RB_INIT(&self->elfs); self->elfs_cnt = 0 ; TAILQ_INIT(&self->abandoned_elfs); pthread_rwlock_init(&self->elfs_lock, NULL ); TAILQ_INIT(&self->blocklist); pthread_mutex_init(&self->blocklist_lock, NULL ); return self; }
elf manager数据结构
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 typedef struct bh_elf_manager bh_elf_manager_t ;typedef RB_HEAD (bh_elf_tree, bh_elf) bh_elf_tree_t ;typedef TAILQ_HEAD (bh_elf_list, bh_elf, ) bh_elf_list_t ;typedef TAILQ_HEAD (bh_elf_manager_block_list, bh_elf_manager_block, ) bh_elf_manager_block_list_t ;struct bh_elf_manager { bool contain_pathname; bool contain_basename; bh_elf_tree_t elfs; size_t elfs_cnt; bh_elf_list_t abandoned_elfs; pthread_rwlock_t elfs_lock; bh_elf_manager_block_list_t blocklist; pthread_mutex_t blocklist_lock; };
bh_trampo_init
Node: 只有mode为automic的时候才会调用init方法
1 2 3 4 5 6 7 8 9 10 11 12 static pthread_key_t bh_trampo_tls_key;static bh_trampo_stack_t bh_hub_stack_cache[BH_TRAMPO_THREAD_MAX];static uint8_t bh_hub_stack_cache_used[BH_TRAMPO_THREAD_MAX];int bh_trampo_init (void ) { if (0 != pthread_key_create(&bh_trampo_tls_key, bh_trampo_stack_destroy)) return -1 ; memset (&bh_hub_stack_cache, 0 , sizeof (bh_hub_stack_cache)); memset (&bh_hub_stack_cache_used, 0 , sizeof (bh_hub_stack_cache_used)); return 0 ; }
bytesig_init
在调用bytesig_init之前,进行了准备工作
__attribute__((constructor))会在main函数调用以前调用
用 __attribute__((constructor)) 定义单独的 init 函数。
通过dlopen 寻找 sigaction64、sigprocmask64函数
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 __attribute__((constructor)) static void bytesig_ctor (void ) { void *libc = dlopen("libc.so" , RTLD_LOCAL); if (__predict_false(NULL == libc)) return ; if (__predict_true(NULL != sigfillset64 && NULL != sigemptyset64 && NULL != sigaddset64 && NULL != sigismember64)) { if (__predict_true(NULL != (bytesig_sigaction = dlsym(libc, "sigaction64" )) && NULL != (bytesig_sigprocmask = dlsym(libc, "sigprocmask64" )))) { bytesig_status = BYTESIG_STATUS_SIG64; goto end; } } if (__predict_true(NULL != (bytesig_sigaction = dlsym(libc, "sigaction" )) && NULL != (bytesig_sigprocmask = dlsym(libc, "sigprocmask" )))) { bytesig_status = BYTESIG_STATUS_SIG32; } end: dlclose(libc); }
注册信号量(SIGSEGV、SIGBUS)
通过bytesig_ctor获取的sigaction64函数指针,调用进行型号量的注册
SIGSEGV
表示段错误(Segmentation Fault)。当一个进程试图访问一个未分配给它的内存区域,或者试图在只读的内存区域上执行写操作时,就会触发段错误信号。
SIGBUS
表示总线错误(Bus Error)。这个信号表示发生了一些硬件相关的错误,比如访问未对齐的内存地址,或者试图在只读的内存区域上执行写操作。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 int bytesig_init (int signum) { if (__predict_false(signum <= 0 || signum >= __SIGRTMIN || signum == SIGKILL || signum == SIGSTOP)) return -1 ; if (__predict_false(BYTESIG_STATUS_UNAVAILABLE == bytesig_status)) return -1 ; if (__predict_false(NULL != bytesig_signal_array[signum])) return -1 ; static pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER; pthread_mutex_lock(&lock); int ret = -1 ; if (__predict_false(NULL != bytesig_signal_array[signum])) goto end; bytesig_signal_t *sig = calloc (1 , sizeof (bytesig_signal_t )); if (__predict_false(NULL == sig)) goto end; #define SA_EXPOSE_TAGBITS 0x00000800 #define REGISTER_SIGNAL_HANDLER(suffix) \ do { \ struct sigaction##suffix act; \ memset(&act, 0, sizeof(struct sigaction##suffix)); \ sigfillset##suffix(&act.sa_mask); \ act.sa_sigaction = bytesig_handler; \ act.sa_flags = SA_SIGINFO | SA_ONSTACK | SA_RESTART | SA_EXPOSE_TAGBITS; \ if (__predict_false( \ 0 != \ ((bytesig_sigaction##suffix##_t)bytesig_sigaction)(signum, &act, &sig->prev_action##suffix))) { \ free(sig); \ goto end; \ } \ } while (0) if (BYTESIG_STATUS_SIG64 == bytesig_status) REGISTER_SIGNAL_HANDLER(64 ); else REGISTER_SIGNAL_HANDLER(); bytesig_signal_array[signum] = sig; ret = 0 ; end: pthread_mutex_unlock(&lock); return ret; }
bh_cfi_disable_slowpath
用于禁用cfi检查。
CFI官网介绍
实现就我来看,好像 是通过修改__cfi_slowpath函数的指令实现的。
可见BH_CFI_ARM64_RET_INST(svc #0)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 int bh_cfi_disable_slowpath (void ) { if (bh_util_get_api_level() < __ANDROID_API_O__) return 0 ; if (NULL == bh_cfi_slowpath || NULL == bh_cfi_slowpath_diag) return -1 ; void *start = bh_cfi_slowpath <= bh_cfi_slowpath_diag ? bh_cfi_slowpath : bh_cfi_slowpath_diag; void *end = bh_cfi_slowpath <= bh_cfi_slowpath_diag ? bh_cfi_slowpath_diag : bh_cfi_slowpath; if (0 != bh_util_set_protect(start, (void *)((uintptr_t )end + sizeof (uint32_t )), PROT_READ | PROT_WRITE | PROT_EXEC)) return -1 ; BYTESIG_TRY(SIGSEGV, SIGBUS) { *((uint32_t *)bh_cfi_slowpath) = BH_CFI_ARM64_RET_INST; *((uint32_t *)bh_cfi_slowpath_diag) = BH_CFI_ARM64_RET_INST; } BYTESIG_CATCH() { return -1 ; } BYTESIG_EXIT __builtin___clear_cache(start, (void *)((size_t )end + sizeof (uint32_t ))); return 0 ; }
hook bhook 的hook类型分为3种
Note:
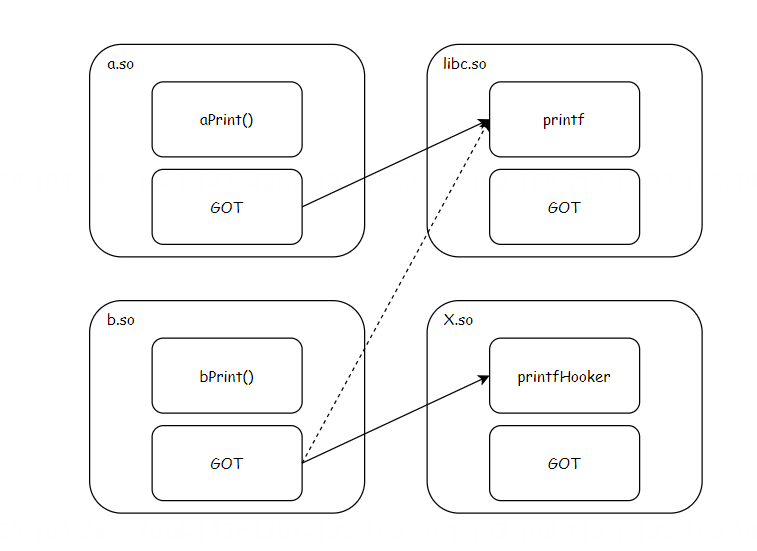
下图中
虚线箭头 表示hook前的got表指向。
实线箭头 表示hook后或实际的got表指向。
hook single
只hook 指定的模块调用。假设有两个so,a.so,b.so分别定义了aPrint,bPrint函数,调用glibc的printf。
通过hook single hook b.so的printf调用。
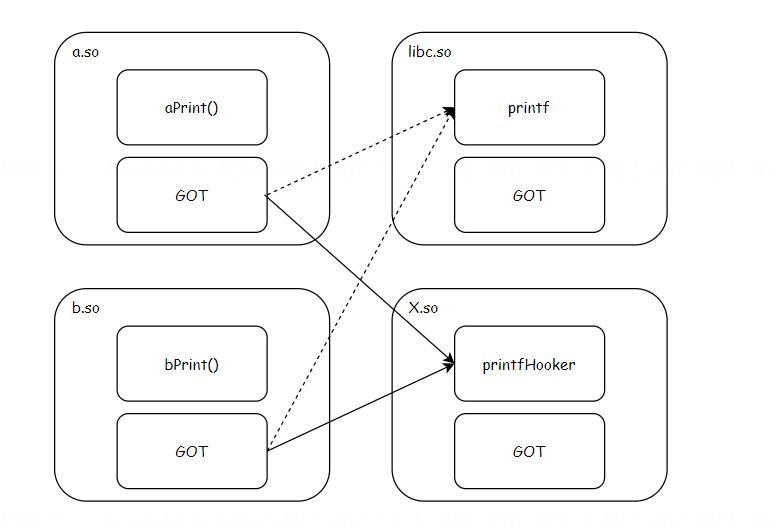
hook all
还是上面的示例,则会hook 所有so对于printf符号表的引用
hook partial
类似于hook all只是加了一个过滤器。不是对所有的调用都进行hook。只有满足hook规则的才会hook。
小小总结一下。
1.hook single只会对指定caller的got表进行修改
2.hook all 不管三七二一,对所有caller的got表进行修改。
3.hook partial 在hook all的基础上,只有对caller满足指定filter函数的要求才会修改got表。
4.hook的本质起始就是对caller的got表的修改。算法的关键在于,怎么找到got表。
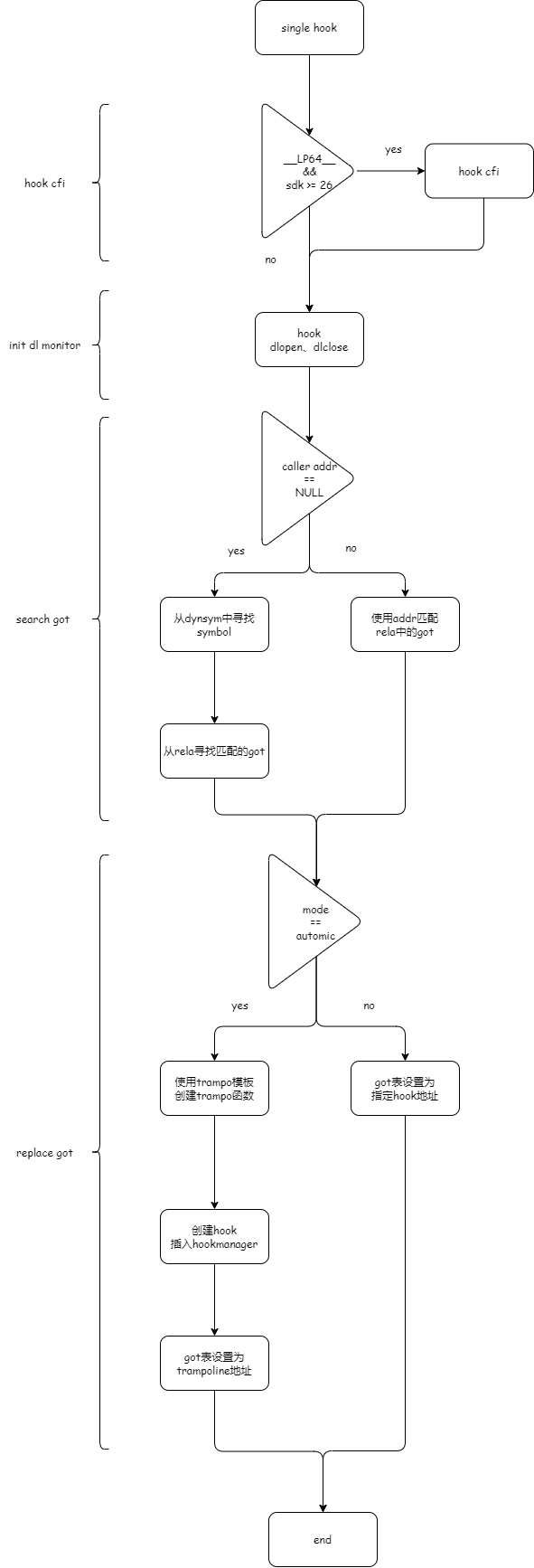
bytehook_hook_single 我们可以把single hook(起始不只是single hook,partial,all起始过程基本上是一样的)
过程分为4个阶段。
hook cfi
这一步主要是绕过android的cfi安全检查。
安全机制的存在导致不能直接修改got表。
这里只是贴一下,保证流程完整,不会细致分析。
init dl monitor
这个流程主要是hook dl,用于兼容对dlopen加载的动态库的hook。
如果不监控dl的链接,hook all,hook partial可能无法覆盖全
(如果我们hook的函数在dlopen加载之后)
search got
GOT/PLT hook的核心是修改got表。
在修改之前,需要把GOT表给找到才行。
replace
最后一步,修改got表。
1 2 3 4 5 6 7 8 9 10 bytehook_stub_t bytehook_hook_single (const char *caller_path_name, const char *callee_path_name, const char *sym_name, void *new_func, bytehook_hooked_t hooked, void *hooked_arg) { const void *caller_addr = __builtin_return_address(0 ); return bh_core_hook_single(caller_path_name, callee_path_name, sym_name, new_func, hooked, hooked_arg, (uintptr_t )caller_addr); }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 bytehook_stub_t bh_core_hook_single (const char *caller_path_name, const char *callee_path_name, const char *sym_name, void *new_func, bytehook_hooked_t hooked, void *hooked_arg, uintptr_t caller_addr) { if (NULL == caller_path_name || NULL == sym_name || NULL == new_func) return NULL ; if (BYTEHOOK_STATUS_CODE_OK != bh_core.init_status) return NULL ; bh_task_t *task = bh_task_create_single(caller_path_name, callee_path_name, sym_name, new_func, hooked, hooked_arg); if (NULL != task) { bh_task_manager_add(bh_core.task_mgr, task); bh_task_manager_hook(bh_core.task_mgr, task); bh_recorder_add_hook(task->hook_status_code, caller_path_name, sym_name, (uintptr_t )new_func, (uintptr_t )task, caller_addr); } return (bytehook_stub_t )task; }
bh_task_manager_add
单纯地添加元素
1 2 3 4 5 6 7 8 void bh_task_manager_add (bh_task_manager_t *self, bh_task_t *task) { pthread_rwlock_wrlock(&self->lock); TAILQ_INSERT_TAIL(&self->tasks, task, link); pthread_rwlock_unlock(&self->lock); }
bh_task_manager_hook
这部分主要是进行
dl monitor的初始化(hook dlopen & dlclose方法)
hook
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 void bh_task_manager_hook (bh_task_manager_t *self, bh_task_t *task) { if (bh_dl_monitor_is_initing()) { static pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER; static bool oneshot_refreshed = false ; if (!oneshot_refreshed) { bool hooked = false ; pthread_mutex_lock(&lock); if (!oneshot_refreshed) { bh_dl_monitor_dlclose_rdlock(); bh_elf_manager_refresh(bh_core_global()->elf_mgr, false , NULL , NULL ); bh_task_hook(task); bh_dl_monitor_dlclose_unlock(); oneshot_refreshed = true ; hooked = true ; } pthread_mutex_unlock(&lock); if (hooked) return ; } } else { if (0 != bh_task_manager_init_dl_monitor(self)) { bh_task_hooked(task, BYTEHOOK_STATUS_CODE_INITERR_DLMTR, NULL , NULL ); return ; } } bh_dl_monitor_dlclose_rdlock(); bh_task_hook(task); bh_dl_monitor_dlclose_unlock(); }
init monitor
只有当monitor没初始化的时候才需要init
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 static int bh_task_manager_init_dl_monitor (bh_task_manager_t *self) { static pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER; static bool inited = false ; static bool inited_ok = false ; if (inited) return inited_ok ? 0 : -1 ; int r; pthread_mutex_lock(&lock); if (!inited) { bh_dl_monitor_set_post_dlopen(bh_task_manager_post_dlopen, self); bh_dl_monitor_set_post_dlclose(bh_task_manager_post_dlclose, NULL ); if (0 == (r = bh_dl_monitor_init())) inited_ok = true ; inited = true ; } else { r = inited_ok ? 0 : -1 ; } pthread_mutex_unlock(&lock); return r; }
monitor初始化过程中核心是hook dl。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 int bh_dl_monitor_init (void ) { int r; pthread_mutex_lock(&lock); bh_dl_monitor_initing = true ; if (!inited) { __atomic_store_n(&inited, true , __ATOMIC_SEQ_CST); BH_LOG_INFO("DL monitor: pre init" ); if (0 == (r = bh_dl_monitor_hook())) { __atomic_store_n(&inited_ok, true , __ATOMIC_SEQ_CST); BH_LOG_INFO("DL monitor: post init, OK" ); } else { BH_LOG_ERROR("DL monitor: post init, FAILED" ); } } else { r = inited_ok ? 0 : -1 ; } bh_dl_monitor_initing = false ; pthread_mutex_unlock(&lock); return r; }
所谓的init monitor主要就是hook
ld的dlopen以及dlclose(兼容不同版本的差异)
Note:
hook调用了bh_core_hook_single/bh_core_hook_all去实现。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 static int bh_dl_monitor_hook (void ) { int api_level = bh_util_get_api_level(); if (api_level >= __ANDROID_API_O__) { if (NULL == (bh_dl_monitor_stub_loader_dlopen = bh_core_hook_single( BH_CONST_BASENAME_DL, NULL , BH_CONST_SYM_LOADER_DLOPEN, (void *)bh_dl_monitor_proxy_loader_dlopen, (BYTEHOOK_MODE_MANUAL == bh_core_get_mode()) ? bh_dl_monitor_proxy_loader_dlopen_hooked : NULL , NULL , (uintptr_t )(__builtin_return_address(0 ))))) goto err; if (NULL == (bh_dl_monitor_stub_loader_android_dlopen_ext = bh_core_hook_single(BH_CONST_BASENAME_DL, NULL , BH_CONST_SYM_LOADER_ANDROID_DLOPEN_EXT, (void *)bh_dl_monitor_proxy_loader_android_dlopen_ext, (BYTEHOOK_MODE_MANUAL == bh_core_get_mode()) ? bh_dl_monitor_proxy_loader_android_dlopen_ext_hooked : NULL , NULL , (uintptr_t )(__builtin_return_address(0 ))))) goto err; } if (api_level < __ANDROID_API_O__) { if (NULL == (bh_dl_monitor_stub_dlclose = bh_core_hook_all( NULL , BH_CONST_SYM_DLCLOSE, (void *)bh_dl_monitor_proxy_dlclose, (BYTEHOOK_MODE_MANUAL == bh_core_get_mode()) ? bh_dl_monitor_proxy_dlclose_hooked : NULL , NULL , (uintptr_t )(__builtin_return_address(0 ))))) goto err; } else { if (NULL == (bh_dl_monitor_stub_loader_dlclose = bh_core_hook_single( BH_CONST_BASENAME_DL, NULL , BH_CONST_SYM_LOADER_DLCLOSE, (void *)bh_dl_monitor_proxy_loader_dlclose, (BYTEHOOK_MODE_MANUAL == bh_core_get_mode()) ? bh_dl_monitor_proxy_loader_dlclose_hooked : NULL , NULL , (uintptr_t )(__builtin_return_address(0 ))))) goto err; } return 0 ; err: bh_dl_monitor_uninit(); return -1 ; }
hook cfi 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 void bh_hook_manager_hook (bh_hook_manager_t *self, bh_task_t *task, bh_elf_t *caller_elf) { if (bh_elf_get_error(caller_elf)) { if (BH_TASK_TYPE_SINGLE == task->type) bh_task_hooked(task, BYTEHOOK_STATUS_CODE_READ_ELF, caller_elf->pathname, NULL ); return ; } #ifdef __LP64__ if (bh_util_get_api_level() >= __ANDROID_API_O__) { if (!caller_elf->cfi_hooked) { bh_elf_cfi_hook_lock(caller_elf); if (!caller_elf->cfi_hooked) { caller_elf->cfi_hooked_ok = bh_hook_manager_hook_cfi(self, caller_elf); caller_elf->cfi_hooked = true ; } bh_elf_cfi_hook_unlock(caller_elf); } if (!caller_elf->cfi_hooked_ok) { if (BH_TASK_TYPE_SINGLE == task->type) bh_task_hooked(task, BYTEHOOK_STATUS_CODE_CFI_HOOK_FAILED, caller_elf->pathname, NULL ); return ; } } #endif bh_hook_manager_hook_impl(self, task, caller_elf); }
search got
寻找got表写入addr_array中
1 2 3 4 5 6 7 8 9 10 11 12 static size_t bh_hook_manager_find_all_got (bh_elf_t *caller_elf, bh_task_t *task, void **addr_array, size_t addr_array_cap) { if (NULL == task->callee_addr) { return bh_elf_find_import_func_addr_by_symbol_name(caller_elf, task->sym_name, addr_array, addr_array_cap); } else { return bh_elf_find_import_func_addr_by_callee_addr(caller_elf, task->callee_addr, addr_array, addr_array_cap); } }
search by symbol name
search by symbol name
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 static size_t bh_elf_find_import_func_addr_by_symbol_name_unsafe (bh_elf_t *self, const char *sym_name, void **addr_array, size_t addr_array_cap) { size_t addr_array_sz = 0 ; ElfW(Sym) *sym = bh_elf_find_import_func_symbol_by_symbol_name(self, sym_name); if (NULL == sym) return 0 ; for (size_t i = 0 ; i < self->rel_plt_cnt; i++) { const Elf_Reloc *rel = &(self->rel_plt[i]); if (&(self->dynsym[BH_ELF_R_SYM(rel->r_info)]) != sym) continue ; if (BH_ELF_R_JUMP_SLOT != BH_ELF_R_TYPE(rel->r_info)) continue ; addr_array[addr_array_sz++] = (void *)(self->load_bias + rel->r_offset); if (addr_array_sz >= addr_array_cap) return addr_array_sz; } for (size_t i = 0 ; i < self->rel_dyn_cnt; i++) { const Elf_Reloc *rel = &(self->rel_dyn[i]); if (&(self->dynsym[BH_ELF_R_SYM(rel->r_info)]) != sym) continue ; if (BH_ELF_R_GLOB_DAT != BH_ELF_R_TYPE(rel->r_info) && BH_ELF_R_ABS != BH_ELF_R_TYPE(rel->r_info)) continue ; addr_array[addr_array_sz++] = (void *)(self->load_bias + rel->r_offset); if (addr_array_sz >= addr_array_cap) return addr_array_sz; } if (NULL != self->rel_dyn_aps2) { bh_sleb128_decoder_t decoder; bh_sleb128_decoder_init(&decoder, self->rel_dyn_aps2, self->rel_dyn_aps2_sz); void *pkg[5 ] = {self, sym, (void *)addr_array, (void *)addr_array_cap, &addr_array_sz}; bh_elf_iterate_aps2(&decoder, bh_elf_find_import_func_addr_by_symbol_name_unsafe_aps2_cb, pkg); } return addr_array_sz; }
search by callee addr
遍历rel.plt 、rel.dyn、rel.dyn aps2 所有的item。
通过:
type == JUMP_SLOT &&
*got == addr
寻找满足条件的got表。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 static size_t bh_elf_find_import_func_addr_by_callee_addr_unsafe (bh_elf_t *self, void *target_addr, void **addr_array, size_t addr_array_cap) { size_t addr_array_sz = 0 ; for (size_t i = 0 ; i < self->rel_plt_cnt; i++) { const Elf_Reloc *rel = &(self->rel_plt[i]); if (BH_ELF_R_JUMP_SLOT != BH_ELF_R_TYPE(rel->r_info)) continue ; if (*((void **)(self->load_bias + rel->r_offset)) != target_addr) continue ; addr_array[addr_array_sz++] = (void *)(self->load_bias + rel->r_offset); if (addr_array_sz >= addr_array_cap) return addr_array_sz; } for (size_t i = 0 ; i < self->rel_dyn_cnt; i++) { const Elf_Reloc *rel = &(self->rel_dyn[i]); if (BH_ELF_R_GLOB_DAT != BH_ELF_R_TYPE(rel->r_info) && BH_ELF_R_ABS != BH_ELF_R_TYPE(rel->r_info)) continue ; if (*((void **)(self->load_bias + rel->r_offset)) != target_addr) continue ; addr_array[addr_array_sz++] = (void *)(self->load_bias + rel->r_offset); if (addr_array_sz >= addr_array_cap) return addr_array_sz; } if (NULL != self->rel_dyn_aps2) { bh_sleb128_decoder_t decoder; bh_sleb128_decoder_init(&decoder, self->rel_dyn_aps2, self->rel_dyn_aps2_sz); void *pkg[5 ] = {self, target_addr, (void *)addr_array, (void *)addr_array_cap, &addr_array_sz}; bh_elf_iterate_aps2(&decoder, bh_elf_find_import_func_addr_by_callee_addr_unsafe_aps2_cb, pkg); } return addr_array_sz; }
replace
下方代码片段中可以发现有两个分支。
分别为bhook两种mode进行了处理
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 static int bh_hook_manager_hook_single_got (bh_hook_manager_t *self, bh_elf_t *caller_elf, bh_task_t *task, void *got_addr, void **orig_func_ret) { if (BYTEHOOK_MODE_MANUAL == bh_core_get_mode()) { r = bh_hook_manager_replace_got_value(caller_elf, task, got_addr, orig_func, task->new_func); if (0 == r) { bh_task_set_manual_orig_func(task, orig_func); BH_LOG_INFO("hook chain: manual REPLACE. GOT %" PRIxPTR ": %" PRIxPTR " -> %" PRIxPTR ", %s, %s" , (uintptr_t )got_addr, (uintptr_t )orig_func, (uintptr_t )task->new_func, task->sym_name, caller_elf->pathname); } if (0 == r) *orig_func_ret = orig_func; } else { void *trampo = NULL ; void *orig_func_real = NULL ; r = bh_hook_manager_add_func(self, caller_elf, got_addr, orig_func, task, &trampo, &orig_func_real); if (0 == r && NULL != trampo) { r = bh_hook_manager_replace_got_value(caller_elf, task, got_addr, orig_func, trampo); if (0 == r) { BH_LOG_INFO("hook chain: auto REPLACE. GOT %" PRIxPTR ": %" PRIxPTR " -> %" PRIxPTR ", %s, %s" , (uintptr_t )got_addr, (uintptr_t )orig_func, (uintptr_t )trampo, task->sym_name, caller_elf->pathname); } else { bh_hook_manager_del_func(self, got_addr, task, NULL ); } } if (0 == r) *orig_func_ret = orig_func_real; } }
manual mode
即手动模式
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 r = bh_hook_manager_replace_got_value(caller_elf, task, got_addr, orig_func, task->new_func); if (0 == r) { bh_task_set_manual_orig_func(task, orig_func); BH_LOG_INFO("hook chain: manual REPLACE. GOT %" PRIxPTR ": %" PRIxPTR " -> %" PRIxPTR ", %s, %s" , (uintptr_t )got_addr, (uintptr_t )orig_func, (uintptr_t )task->new_func, task->sym_name, caller_elf->pathname); } if (0 == r) *orig_func_ret = orig_func;
1.replace got value
1)确保got表和symbol是匹配的
2)获取got表segment的权限(如果got表没有写权限,通过mprotect写入写权限)
3)通过atomic内置函数设置got表内容为new_func指针。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 static int bh_hook_manager_replace_got_value (bh_elf_t *caller_elf, bh_task_t *task, void *got_addr, void *orig_func, void *new_func) { if (BH_TASK_STATUS_UNHOOKING != task->status) { if (0 != bh_hook_manager_verify_got_value(caller_elf, task, got_addr)) { bh_task_hooked(task, BYTEHOOK_STATUS_CODE_GOT_VERIFY, caller_elf->pathname, orig_func); return BYTEHOOK_STATUS_CODE_GOT_VERIFY; } } int prot = bh_elf_get_protect_by_addr(caller_elf, got_addr); if (0 == prot) { bh_task_hooked(task, BYTEHOOK_STATUS_CODE_GET_PROT, caller_elf->pathname, orig_func); return BYTEHOOK_STATUS_CODE_GET_PROT; } if (0 == (prot & PROT_WRITE)) { if (0 != bh_util_set_addr_protect(got_addr, prot | PROT_WRITE)) { bh_task_hooked(task, BYTEHOOK_STATUS_CODE_SET_PROT, caller_elf->pathname, orig_func); return BYTEHOOK_STATUS_CODE_SET_PROT; } } int r; BYTESIG_TRY(SIGSEGV, SIGBUS) { __atomic_store_n((uintptr_t *)got_addr, (uintptr_t )new_func, __ATOMIC_SEQ_CST); r = 0 ; } BYTESIG_CATCH() { bh_elf_set_error(caller_elf, true ); bh_task_hooked(task, BYTEHOOK_STATUS_CODE_SET_GOT, caller_elf->pathname, orig_func); r = BYTEHOOK_STATUS_CODE_SET_GOT; } BYTESIG_EXIT if (0 == (prot & PROT_WRITE)) bh_util_set_addr_protect(got_addr, prot); return r; }
2.将got表中原始内容设置到task结构体中,以便unhook恢复
1 2 3 4 bh_task_set_manual_orig_func(task, orig_func); BH_LOG_INFO("hook chain: manual REPLACE. GOT %" PRIxPTR ": %" PRIxPTR " -> %" PRIxPTR ", %s, %s" , (uintptr_t )got_addr, (uintptr_t )orig_func, (uintptr_t )task->new_func, task->sym_name, caller_elf->pathname);
3.return 原始地址
1 2 *orig_func_ret = orig_func;
automic mode
自动模式
1.添加hook function
2.将got表地址替换为trampo
3.返回原始函数地址
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 void *trampo = NULL ;void *orig_func_real = NULL ;r = bh_hook_manager_add_func(self, caller_elf, got_addr, orig_func, task, &trampo, &orig_func_real); if (0 == r && NULL != trampo) { r = bh_hook_manager_replace_got_value(caller_elf, task, got_addr, orig_func, trampo); if (0 == r) { BH_LOG_INFO("hook chain: auto REPLACE. GOT %" PRIxPTR ": %" PRIxPTR " -> %" PRIxPTR ", %s, %s" , (uintptr_t )got_addr, (uintptr_t )orig_func, (uintptr_t )trampo, task->sym_name, caller_elf->pathname); } else { bh_hook_manager_del_func(self, got_addr, task, NULL ); } } if (0 == r) *orig_func_ret = orig_func_real;
1.add function
(1) 依据got表地址从红黑树中寻找hook结构体bh_hook_t
(2) 如果没找到就创建一个hook结构体,插入红黑树
1)创建hook结构体
2)依据trampoline template生成trampoline function
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 void *trampo = NULL ;void *orig_func_real = NULL ;r = bh_hook_manager_add_func(self, caller_elf, got_addr, orig_func, task, &trampo, &orig_func_real); static int bh_hook_manager_add_func (bh_hook_manager_t *self, bh_elf_t *caller_elf, void *got_addr, void *orig_func, bh_task_t *task, void **trampo, void **orig_func_ret) { *trampo = NULL ; int r; pthread_mutex_lock(&self->hooks_lock); bh_hook_t *hook = bh_hook_manager_find_hook(self, got_addr); *orig_func_ret = (NULL == hook ? orig_func : hook->orig_func); if (NULL == hook) hook = bh_hook_manager_create_hook(self, got_addr, orig_func, trampo); if (NULL == hook) { bh_task_hooked(task, BYTEHOOK_STATUS_CODE_NEW_TRAMPO, caller_elf->pathname, orig_func); r = BYTEHOOK_STATUS_CODE_NEW_TRAMPO; goto end; } if (0 != (r = bh_hook_add_func(hook, task->new_func, task->id))) { bh_task_hooked(task, r, caller_elf->pathname, orig_func); goto end; } r = 0 ; end: pthread_mutex_unlock(&self->hooks_lock); return r; }
hook结构体创建
1.结构体的初始化
2.创建trampoline function
3.插入hookmanager 红黑树中
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 static bh_hook_t *bh_hook_manager_create_hook (bh_hook_manager_t *self, void *got_addr, void *orig_func, void **trampo) { bh_hook_t *hook = bh_hook_create(got_addr, orig_func); if (NULL == hook) return NULL ; *trampo = bh_trampo_create(hook); if (NULL == *trampo) { bh_hook_destroy(&hook); return NULL ; } RB_INSERT(bh_hook_tree, &self->hooks, hook); BH_LOG_INFO("hook chain: created for GOT %" PRIxPTR ", orig func %" PRIxPTR, (uintptr_t )got_addr, (uintptr_t )orig_func); return hook; }
重点介绍下trampoline function的创建
过程如下
1.为trampoline function分配内存
2.填充code & data
code填充的内容是bh_trampo_template函数
data填充了两部分bh_trampo_push_stack 函数指针and hook结构体
Node:
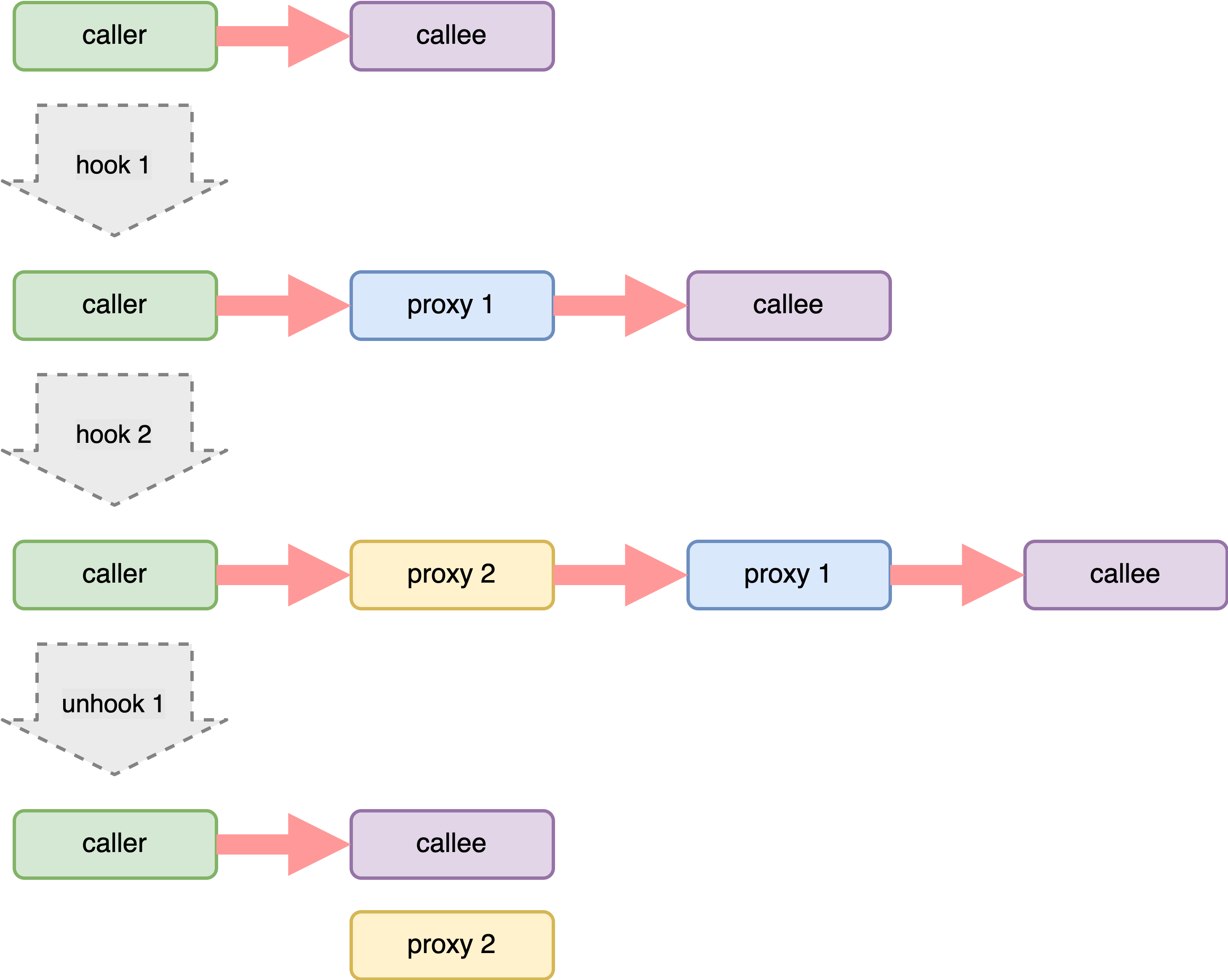
trampo是一个跳板。
每一个got表会对应一个跳板函数。
也就是说我们的hook会由跳板去做管理。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 void *bh_trampo_create (bh_hook_t *hook) { size_t code_size = (uintptr_t )(&bh_trampo_data) - (uintptr_t )(bh_trampo_template_pointer()); size_t data_size = sizeof (void *) + sizeof (void *); void *trampo = bh_trampo_allocate(code_size + data_size); if (NULL == trampo) return NULL ; BYTESIG_TRY(SIGSEGV, SIGBUS) { memcpy (trampo, bh_trampo_template_pointer(), code_size); } BYTESIG_CATCH() { return NULL ; } BYTESIG_EXIT void **data = (void **)((uintptr_t )trampo + code_size); *data++ = (void *)bh_trampo_push_stack; *data = (void *)hook; __builtin___clear_cache((char *)trampo, (char *)trampo + code_size + data_size); BH_LOG_INFO("trampo: created for GOT %" PRIxPTR " at %" PRIxPTR ", size %zu + %zu = %zu" , (uintptr_t )hook->got_addr, (uintptr_t )trampo, code_size, data_size, code_size + data_size); #if defined(__arm__) && defined(__thumb__) trampo = (void *)((uintptr_t )trampo + 1 ); #endif return trampo; }
替换got表地址
1 2 3 4 5 6 7 8 9 10 11 12 13 14 if (0 == r && NULL != trampo) { r = bh_hook_manager_replace_got_value(caller_elf, task, got_addr, orig_func, trampo); if (0 == r) { BH_LOG_INFO("hook chain: auto REPLACE. GOT %" PRIxPTR ": %" PRIxPTR " -> %" PRIxPTR ", %s, %s" , (uintptr_t )got_addr, (uintptr_t )orig_func, (uintptr_t )trampo, task->sym_name, caller_elf->pathname); } else { bh_hook_manager_del_func(self, got_addr, task, NULL ); } }
返回origin address
1 2 if (0 == r) *orig_func_ret = orig_func_real;
bytehook_hook_partial
在分析了hook single以后,查看hook partial。
发现实现的原理都是类似的
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 bytehook_stub_t bh_core_hook_partial (bytehook_caller_allow_filter_t caller_allow_filter, void *caller_allow_filter_arg, const char *callee_path_name, const char *sym_name, void *new_func, bytehook_hooked_t hooked, void *hooked_arg, uintptr_t caller_addr) { if (NULL == caller_allow_filter || NULL == sym_name || NULL == new_func) return NULL ; if (BYTEHOOK_STATUS_CODE_OK != bh_core.init_status) return NULL ; bh_task_t *task = bh_task_create_partial(caller_allow_filter, caller_allow_filter_arg, callee_path_name, sym_name, new_func, hooked, hooked_arg); if (NULL != task) { bh_task_manager_add(bh_core.task_mgr, task); bh_task_manager_hook(bh_core.task_mgr, task); bh_recorder_add_hook(BYTEHOOK_STATUS_CODE_MAX, "PARTIAL" , sym_name, (uintptr_t )new_func, (uintptr_t )task, caller_addr); } return (bytehook_stub_t )task; }
hook all & hook partial 的差别就是进入了不同的分支
1 2 3 4 5 6 7 8 9 10 11 12 13 static void bh_task_handle (bh_task_t *self) { switch (self->type) { case BH_TASK_TYPE_SINGLE: { bh_elf_t *caller_elf = bh_elf_manager_find_elf(bh_core_global()->elf_mgr, self->caller_path_name); if (NULL != caller_elf) bh_task_hook_or_unhook(self, caller_elf); break ; } case BH_TASK_TYPE_ALL: case BH_TASK_TYPE_PARTIAL: bh_elf_manager_iterate(bh_core_global()->elf_mgr, bh_task_elf_iterate_cb, (void *)self); break ; } }
主要的区别在于
hook single由于知道caller & callee 直接就hook了。
partial & all由于不知道caller具体有哪些,有些caller可能是后续dlopen加载的。
所以需要通过dl_iterator遍历所有elf文件
1 2 3 4 5 6 bh_elf_manager_iterate(bh_core_global()->elf_mgr, bh_task_elf_iterate_cb, (void *)self); static bool bh_task_elf_iterate_cb (bh_elf_t *elf, void *arg) { return bh_task_hook_or_unhook((bh_task_t *)arg, elf); }
bh_elf_manager_iterate。
1.bh_elf_manager_t中的elf指针全部拷贝一份
2.逐一调用callback
上述过程等价于遍历所有的elf文件逐一进行hook。
bh_elf_manager_t的elf文件来源于dl monitor。
dl monitor会hook dlopen方法,这样就能拿到所有加载的elf文件。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 void bh_elf_manager_iterate (bh_elf_manager_t *self, bh_elf_manager_iterate_cb_t cb, void *cb_arg) { if (0 == self->elfs_cnt) return ; bh_elf_t **copy_elfs = NULL ; size_t copy_elfs_cnt = 0 ; pthread_rwlock_rdlock(&self->elfs_lock); if (self->elfs_cnt > 0 ) { if (NULL != (copy_elfs = malloc (sizeof (bh_elf_t *) * self->elfs_cnt))) { copy_elfs_cnt = self->elfs_cnt; size_t i = 0 ; bh_elf_t *elf; RB_FOREACH(elf, bh_elf_tree, &self->elfs) { copy_elfs[i++] = elf; } } } pthread_rwlock_unlock(&self->elfs_lock); if (NULL != copy_elfs) { bool cb_next = true ; for (size_t i = 0 ; i < copy_elfs_cnt; i++) { if (cb_next) cb_next = cb(copy_elfs[i], cb_arg); } free (copy_elfs); } }
除了对需要hook的elf不确定以外。还有一大区别。
即是调用过滤。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 static bool bh_task_hook_or_unhook (bh_task_t *self, bh_elf_t *elf) { void (*hook_or_unhook)(bh_hook_manager_t *, bh_task_t *, bh_elf_t *) = (BH_TASK_STATUS_UNHOOKING == self->status ? bh_hook_manager_unhook : bh_hook_manager_hook); switch (self->type) { case BH_TASK_TYPE_SINGLE: if (bh_elf_is_match(elf, self->caller_path_name)) { hook_or_unhook(bh_core_global()->hook_mgr, self, elf); if (BH_TASK_STATUS_UNHOOKING != self->status) self->status = BH_TASK_STATUS_FINISHED; return false ; } return true ; case BH_TASK_TYPE_PARTIAL: if (self->caller_allow_filter(elf->pathname, self->caller_allow_filter_arg)) hook_or_unhook(bh_core_global()->hook_mgr, self, elf); return true ; case BH_TASK_TYPE_ALL: hook_or_unhook(bh_core_global()->hook_mgr, self, elf); return true ; } }
bytehook_hook_all
实现原理和hook partial && hook single 类似,hook all对比于hook partial没有过滤条件
1 2 3 4 5 6 7 8 case BH_TASK_TYPE_PARTIAL: if (self->caller_allow_filter(elf->pathname, self->caller_allow_filter_arg)) hook_or_unhook(bh_core_global()->hook_mgr, self, elf); return true ; case BH_TASK_TYPE_ALL: hook_or_unhook(bh_core_global()->hook_mgr, self, elf); return true ;
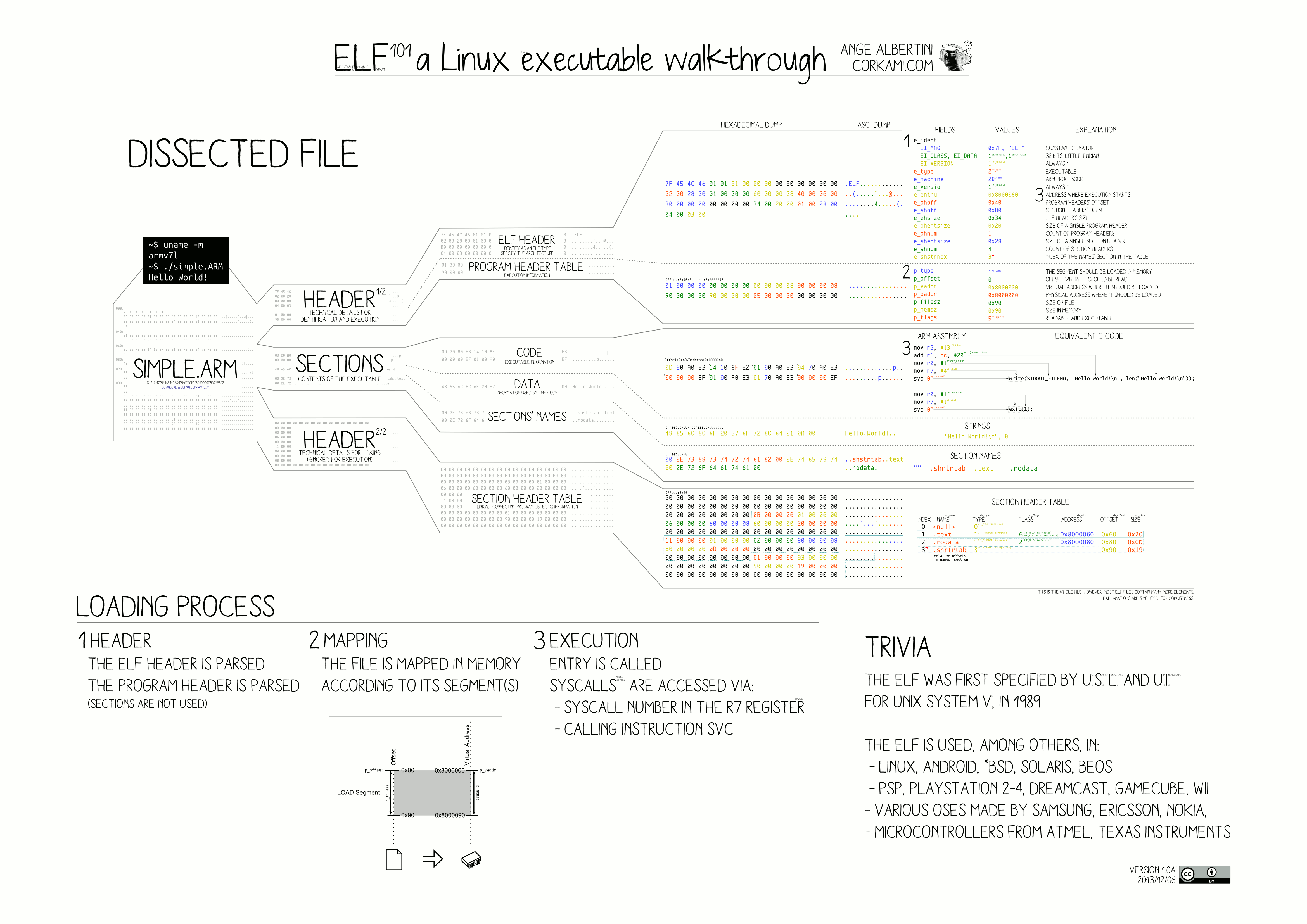
QA bh_dl_open_linker创建bh_dl_t的时候为什么要去读file?
描述:
bh_dl_open_linker做了一件事情就是——创建bh_dl_t。
创建bh_dl_t需要做两个section的内容 & 大小(.symtab、.strtab)
可以发现**// ELF info** 注解处其实是已经使用了从内存中获取的base地址获取ELF的基础信息。
为什么还需要bh_dl_load_symtab去读取文件呢?
直接使用base继续去读取section难道不会更快、更简单吗?
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 void *bh_dl_open_linker (void ) { uintptr_t base = bh_dl_find_linker_base_from_auxv(); #if __ANDROID_API__ < __ANDROID_API_J_MR2__ if (0 == base) base = bh_dl_find_linker_base_from_maps(); #endif if (0 == base) return NULL ; ElfW(Ehdr) *ehdr = (ElfW(Ehdr) *)base; const ElfW (Phdr) *dlpi_phdr = (const ElfW(Phdr) *)(base + ehdr->e_phoff); ElfW(Half) dlpi_phnum = ehdr->e_phnum; uintptr_t min_vaddr = UINTPTR_MAX; for (size_t i = 0 ; i < dlpi_phnum; i++) { const ElfW (Phdr) *phdr = &(dlpi_phdr[i]); if (PT_LOAD == phdr->p_type) { if (min_vaddr > phdr->p_vaddr) min_vaddr = phdr->p_vaddr; } } if (UINTPTR_MAX == min_vaddr || base < min_vaddr) return NULL ; uintptr_t load_bias = base - min_vaddr; bh_dl_t *self; if (NULL == (self = calloc (1 , sizeof (bh_dl_t )))) return NULL ; self->load_bias = load_bias; self->base = base; if (0 != bh_dl_load_symtab(self, BH_CONST_PATHNAME_LINKER)) { free (self); return NULL ; } return (void *)self; }
回答:
通过测试发现
如果使用base去读section会报错。
Fatal signal 11 (SIGSEGV), code 1 (SEGV_MAPERR), fault addr XXXX
也就是说,地址非法。
因为process在加载的时候不会加载section header
automic mode & manual mode的区别?
automic mode更适合复杂的hook。
因为有trampoline管理我们的hook链,更加适合可能出现重复hook的情况。
manual mode适合简单的hook。
手动模式下只是简单的替换got表。
如果是重复hook,比谁后hook了。因为后一次的hook会覆盖前一次。
PLT/GOT hook的局限性?
从上面的原理分析中我们可以知道一点。
PLT/GOT hook 只能hook有PLT/GOT表参与的函数调用。
如果没有,就无法实现。
然而不是说所有的函数调用都有PLT/GOT表。
只有跨模块调用才有。即调用外部的so文件的情况下,编译器才会生成PLT/GOT
模块内 的函数调用是使用的相对地址。没有PLT/GOT表的参与 ,所以Hook失效